|
Jiong Lin I am a PhD student at the Creative Machines lab, starting in the Fall 2023 semester under the supervision of Prof. Hod Lipson. My research focuses on robotics and machine learning. Previously, I was a research-track master's student, working on both hardware and deep learning projects. I earned my bachelor's degree in Mechanical Engineering from Huazhong University of Science and Technology. |
|
Research |

|
Generative Synthesis of Kinematic Mechanisms
Jiong Lin, Jialong Ning, Judah Goldfeder, Hod Lipson NeurIPS 2025, Creative AI Track project page / code We formulate the problem of kinematic synthesis for planar linkages as a cross-domain image generation task. We develop a planar linkages dataset using RGB image representations, covering a range of mechanisms: from simple types such as crank-rocker and crank-slider to more complex eight-bar linkages like Jansen's mechanism. |
|
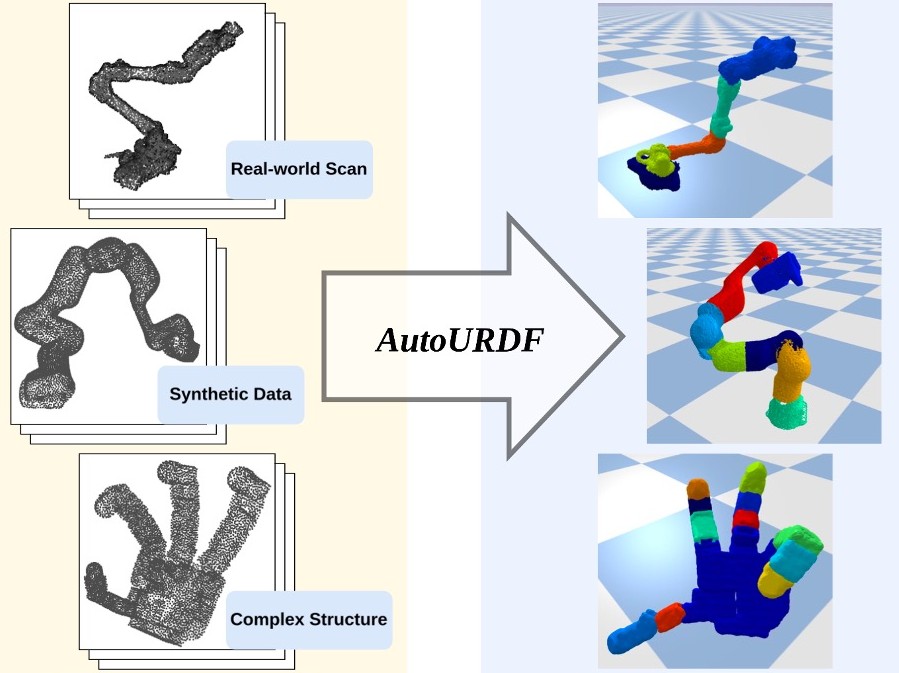
AutoURDF: Unsupervised Robot Modeling from Point Cloud Frames Using Cluster Registration
Jiong Lin, Lechen Zhang, Kwansoo Lee, Jialong Ning, Judah Goldfeder, Hod Lipson CVPR 2025 paper / project page / arXiv / code / poster An unsupervised approach for constructing description files for unseen robots from point cloud frames. |
|
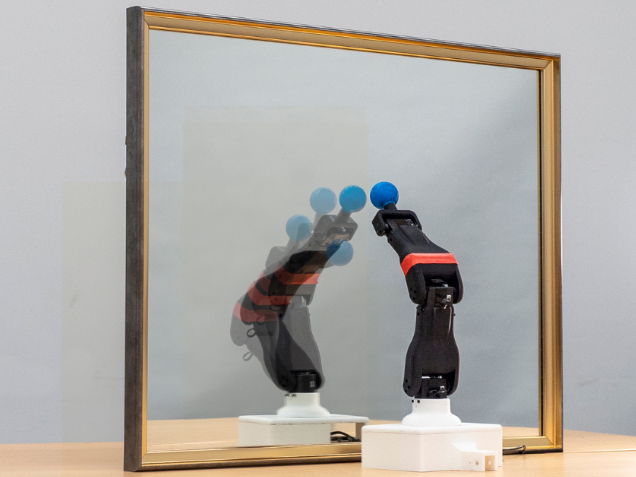
Teaching robots to build simulations of themselves
Yuhang Hu, Jiong Lin, Hod Lipson Nature Machine Intelligence 2025 paper / arXiv Robots can now build kinematic self-awareness from raw video using deep neural networks, enabling them to model their 3D shapes from a single 2D camera, infer motion, adapt to changes, and recover from simulated damage without constant programming. |
|
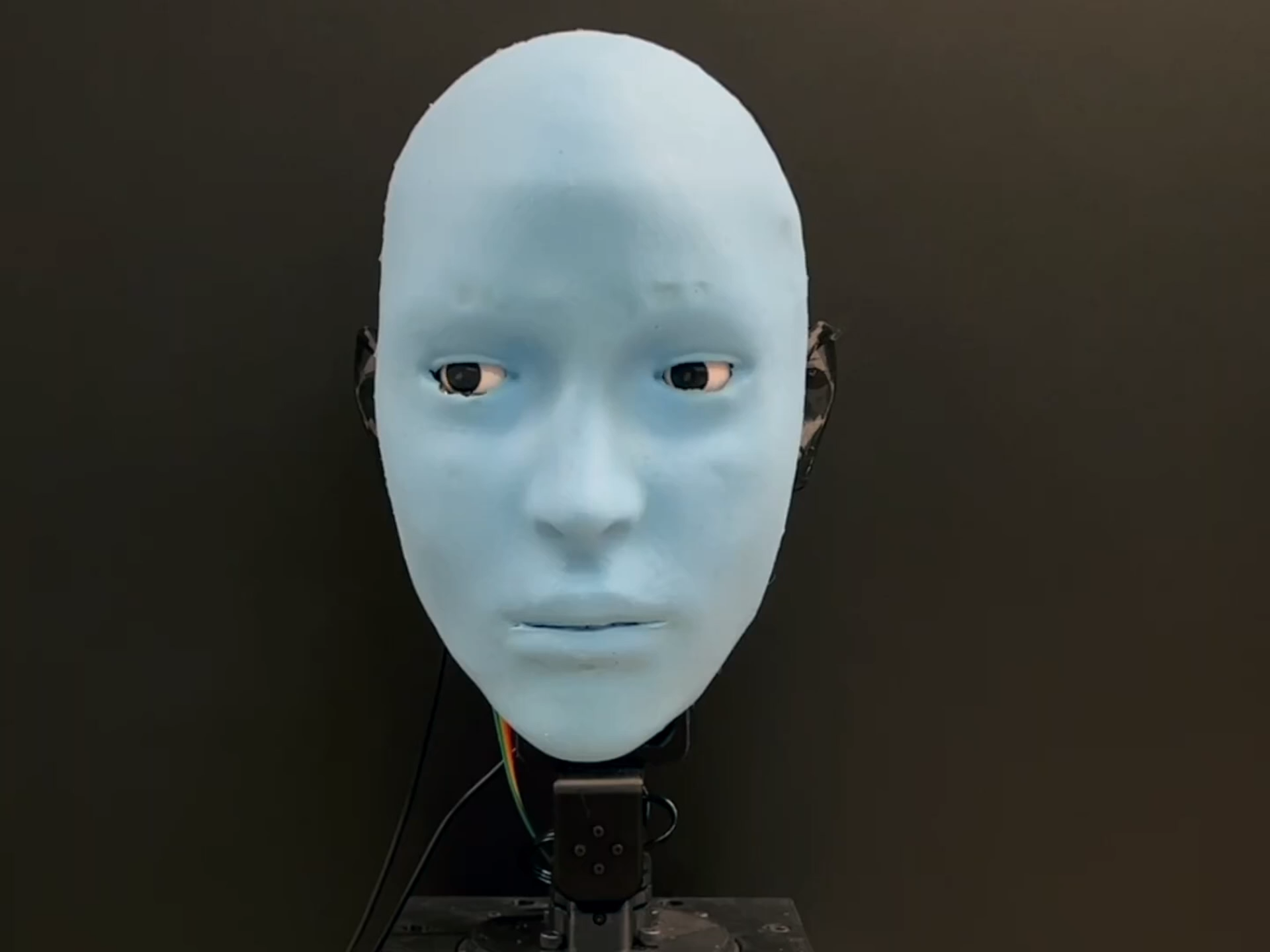
Human-robot facial coexpression
Yuhang Hu, Boyuan Chen, Jiong Lin, Yunzhe Wang, Yingke Wang, Cameron Mehlman, Hod Lipson Science Robotics 2024 paper We developed and trained our humanoid facial robot, Emo, with 26 motors and flexible silicone skin to anticipate and mirror human expressions in real time, predicting a smile 839 milliseconds before it occurs by analyzing subtle facial changes. |
|
|